
Introducción
El monitoreo de condición es una herramienta valiosa para detectar fallas y analizar el estado de los motores. Los motores se utilizan ampliamente en diversas aplicaciones industriales y pueden experimentar numerosos problemas con el tiempo. Estos problemas pueden provocar una disminución de la eficiencia, mayores costos de mantenimiento y fallas del motor si no se abordan de inmediato. El monitoreo de condición ayuda a identificar estas fallas de manera temprana, lo que permite un mantenimiento oportuno y evita averías costosas. El monitoreo de condición también es valioso para garantizar que los motores estén funcionando en un estado que evite el desarrollo de fallas eléctricas.
Dado que los motores son tanto eléctricos como mecánicos por diseño, ambos tipos de fallas son comunes. Un malentendido común es que el monitoreo de vibraciones solo puede detectar defectos mecánicos en un motor y que el monitoreo eléctrico solo puede detectar fallas eléctricas en un motor. En realidad, existe una superposición en estas técnicas para identificar fallas relacionadas con el motor debido a los principios de funcionamiento físico de un motor.
El propósito de este artículo es resumir las fallas eléctricas de los motores, cómo detectar estas fallas y los métodos de prevención.
Principios de funcionamiento del motor
Para comprender mejor las fallas eléctricas del motor, es necesario comprender algunos principios clave relacionados con el funcionamiento del motor. Esto se aplica principalmente al caso de un motor de inducción, donde la velocidad de rotación del campo magnético inducido (definido por la frecuencia de la línea eléctrica y la cantidad de polos del motor) difiere de la velocidad de rotación mecánica del motor. Estas definiciones se encuentran a continuación:
- Frecuencia de línea:La frecuencia de línea es la frecuencia de la corriente alterna (CA) suministrada al motor de inducción por la red eléctrica. En la mayoría de las regiones, la frecuencia de línea estándar es de 50 Hz o 60 Hz. La frecuencia de línea determina la velocidad a la que los campos magnéticos en los devanados del estator alternan la polaridad, lo que, a su vez, induce corrientes en el rotor para producir par y rotación.
- Número de polos del motor:La cantidad de polos de un motor de inducción afecta directamente sus características de funcionamiento y rendimiento. Los motores con más polos tienen velocidades sincrónicas más bajas y capacidades de par más altas. Los motores de 2 y 4 polos son los más comunes.
- Velocidad sincrónica del motor:La velocidad síncrona de un motor se refiere a la velocidad de rotación teórica del campo magnético del motor creado por los devanados del estator. Está determinada por la frecuencia de la corriente alterna (CA) suministrada al motor y la cantidad de polos magnéticos del motor.
La velocidad síncrona (Ns) de un motor de CA viene dada por la siguiente fórmula:
Ns = (120 * f) / P
Dónde:
Ns = Velocidad sincrónica en revoluciones por minuto (RPM)
f = Frecuencia de línea en hercios (Hz)
P = Número de polos en el motor
- Velocidad del rotor:La velocidad de rotación mecánica del rotor y del eje. Esta siempre va por detrás de la velocidad sincrónica para los motores de inducción. Para los motores de imanes permanentes, es igual a la velocidad sincrónica.
- Frecuencia de deslizamiento:La frecuencia de deslizamiento es la diferencia entre la velocidad sincrónica del campo magnético giratorio en el estator y la velocidad real del rotor. El deslizamiento también suele calcularse como un porcentaje (relación entre la velocidad de deslizamiento y la velocidad sincrónica), pero en este artículo nos centraremos en la frecuencia de deslizamiento porque se utiliza para determinar la frecuencia de paso de polos.
La frecuencia de deslizamiento (F_s) se puede calcular utilizando la siguiente fórmula:
F_s = (Ns - Nr)
Dónde:
Ns = Velocidad sincrónica (en revoluciones por minuto o RPM)
Nr = Velocidad del rotor (en RPM)
- Frecuencia de paso de polos:La frecuencia de paso de polos es la frecuencia a la que los campos magnéticos del devanado del estator se "cruzan" entre sí a medida que gira el rotor. Es una función tanto de la frecuencia de línea como de la cantidad de polos del motor.
La frecuencia de paso de polos (F_p) se puede calcular utilizando la siguiente fórmula:
F_p = F_s * P
Dónde:
F_s = Frecuencia de deslizamiento
P = Número de polos
- Frecuencia de paso de la barra del rotor:El frecuencia generada en función de la cantidad de barras del rotor de un motor y la velocidad del rotor. Esto suele ser difícil de obtener debido a la dificultad de determinar la cantidad de barras del rotor de un motor, pero generalmente se encuentra en las frecuencias más altas.
La frecuencia de paso de la barra del rotor (F_rb) se puede calcular utilizando la siguiente fórmula:
F_rb = #rb * Nro
Dónde:
#rb = Número de barras del rotor del motor
Nr = Velocidad del rotor
La capacidad de detectar fallas eléctricas del motor depende de la tendencia confiable de los niveles de amplitud de estas frecuencias.
El beneficio de detectar el flujo magnético de un motor
De las definiciones anteriores se desprende claramente que calcular y establecer tendencias de estos valores de frecuencia para cada muestra de motor puede llevar bastante tiempo. Esto es especialmente cierto en el caso de los motores de inducción con distintas velocidades y cargas. Al detectar el flujo magnético del motor, se puede determinar la frecuencia de línea. Al mismo tiempo, se puede determinar la velocidad del rotor a partir de los datos del acelerómetro. Una vez definidas estas dos variables, se pueden obtener y analizar fácilmente las frecuencias restantes para detectar el desarrollo de fallas.
Tipos de fallas eléctricas del motor
Las fallas eléctricas del motor se clasifican generalmente como fallas relacionadas con el rotor o fallas relacionadas con el estator. Esto se debe principalmente a sus características y causas fundamentales. Las fallas comunes y sus características se describen a continuación.
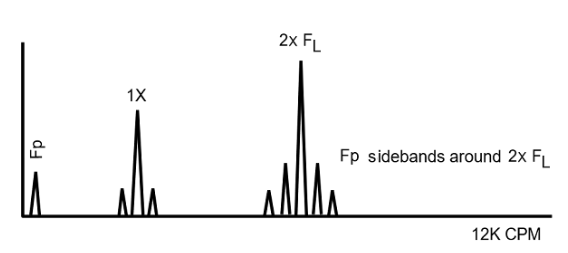
Las fallas del rotor se centran en defectos de una o varias barras del rotor, o en la excentricidad del rotor. Al diagnosticar la excentricidad del rotor, las frecuencias críticas a examinar son múltiplos de las RPM del rotor (1X, 2X, 3X, 4X, 5X) con bandas laterales espaciadas a 2X la frecuencia de línea.
Excentricidad del rotor
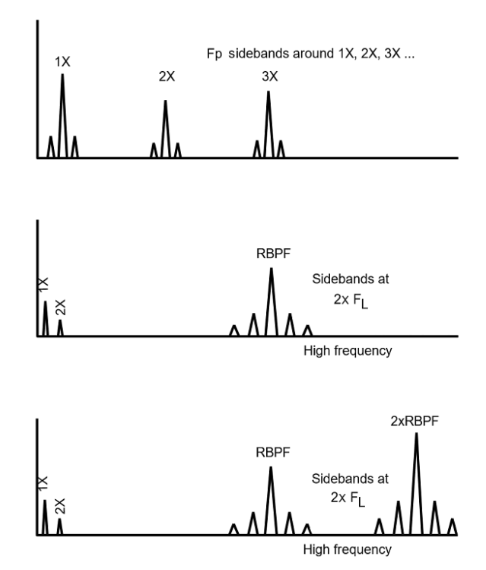
Para los problemas de barra del rotor, las frecuencias críticas son múltiplos de la frecuencia de paso de la barra del rotor (1X, 2X) con bandas laterales espaciadas a 2X la frecuencia de línea o 2X la frecuencia de paso de polo.
Defectos en la barra del rotor
Las fallas más comunes del estator son la excentricidad del estator, las laminaciones en cortocircuito o las conexiones flojas. La excentricidad del estator y las laminaciones en cortocircuito se encuentran con amplitudes altas al doble de la frecuencia de línea. También son muy direccionales debido a un entrehierro irregular.
Excentricidad del estator, laminaciones en cortocircuito
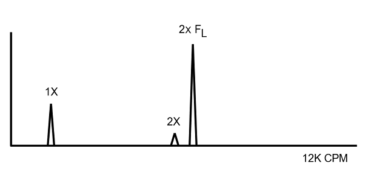
Las conexiones sueltas se presentan como un problema de fase y tienen una alta vibración a 2 veces la frecuencia de línea con un espacio de bandas laterales a ⅓ de la frecuencia de línea.
Conexiones sueltas o rotas

Un aspecto importante a tener en cuenta es que estas fallas se identifican con vibración y son detectadas por el acelerómetro. El sensor de flujo magnético permite obtener un valor rápido y preciso de la frecuencia de la línea para identificar estas frecuencias y localizar la falla. También es importante mencionar que la carga del motor juega un papel importante en la identificación de estas fallas. Una carga del motor más alta genera un campo magnético más fuerte, lo que da como resultado fuerzas desiguales que causan la vibración.
Métodos de detección adicionales
Además del monitoreo de vibraciones, existen métodos adicionales para descubrir fallas eléctricas en motores. El método más conocido es el Análisis del Circuito del Motor (MCA), que es una prueba que se realiza con el motor fuera de línea y se utiliza para identificar varias fallas, como la pérdida de aislamiento. Se pueden realizar métodos adicionales en línea, como el Análisis de Firma Eléctrica (ESA) y el Análisis de Firma de Corriente del Motor (MCSA), y se pueden usar datos de voltaje, corriente o ambos para identificar fallas.
Estos métodos son extremadamente valiosos cuando se producen fallas en el motor debido a problemas de calidad de la energía. Por lo general, también pueden detectar fallas eléctricas en una etapa más temprana. En la siguiente tabla se muestra un resumen de estos métodos.
MCA | ESA | Asociaciones de médicos y enfermeras | |
|---|---|---|---|
Propósito principal | Probar los circuitos eléctricos y el sistema de aislamiento de un motor eléctrico, buscando principalmente problemas relacionados con la rotura o contaminación del aislamiento. | Analizar la salud eléctrica y mecánica de equipos rotativos. Tiene capacidad de detectar algunas fallas mecánicas en la firma eléctrica. | Se enfoca específicamente en motores eléctricos y fallas eléctricas mediante el análisis de los patrones de firma actuales. |
Fuera de línea/En línea | Requiere circuito de motor fuera de línea | Requiere que el motor esté en marcha | Requiere que el motor esté en marcha |
Voltaje medido | Sí (para pruebas de aislamiento) | Sí | No (Solo análisis actual) |
Corriente medida | Sí | Sí | Sí |
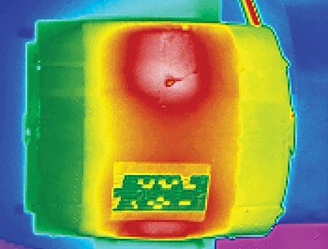
Otra herramienta útil para el monitoreo predictivo de motores es la termografía. El concepto principal aquí es determinar si el motor está funcionando a temperaturas elevadas y buscar posibles puntos calientes localizados. Los puntos calientes localizados podrían indicar cortocircuitos parciales en el estator del motor. A continuación se ofrece un ejemplo de esto.
El beneficio oculto del monitoreo continuo
Las fallas eléctricas del motor a menudo no se detectan hasta que se llega al punto de falla. Una vez que esto sucede, se reemplaza el motor y, debido a su complejidad, a menudo no se desmontan para determinar la causa raíz de la falla. Esto puede provocar fallas repetidas y problemas crónicos.
El monitoreo de las condiciones ayuda a prevenir esto al proporcionar datos continuos sobre las variables que afectan la salud del motor. El monitoreo de las temperaturas del motor garantiza que no se produzca degradación del aislamiento. Esto también es válido para el desgaste de los cojinetes, que puede provocar inconsistencias en el espacio de aire y, en algunos casos, contacto entre el rotor y el estator. Contar con esta información adicional puede ayudar a determinar las causas fundamentales del desarrollo de fallas. Esto permite un cambio de enfoque del análisis de la causa fundamental de las fallas post mortem al análisis de la causa fundamental de las fallas, lo que maximiza la vida útil de los activos, aumenta en gran medida la confiabilidad y reduce los costos generales de mantenimiento.
Causas comunes de fallas eléctricas en motores
La detección de fallas eléctricas del motor y el trabajo correctivo para solucionarlas pueden proporcionar un rápido aumento en la confiabilidad al trasladar el trabajo de una avería no planificada a una reparación programada. Este aumento en la confiabilidad a menudo no se refleja en el presupuesto de mantenimiento. Para reducir el gasto en mantenimiento, es importante comprender las causas fundamentales del desarrollo de fallas y establecer un plan para minimizarlas. A continuación, se incluye una tabla con las causas fundamentales típicas asociadas con las fallas analizadas anteriormente.
Fallas eléctricas del motor | Causas comunes |
|---|---|
Excentricidad del rotor | - Distribución desigual de la carga en el rotor. |
- Desalineación entre rotor y eje. | |
- Defectos o desgaste de los cojinetes. | |
Defectos en la barra del rotor | - Sobrecarga o arranques/paradas frecuentes. |
- Temperatura excesiva que provoca fallos en el aislamiento de la barra. | |
- Vibraciones o tensiones mecánicas que provoquen rotura de la barra. | |
Excentricidad del estator | - Desalineación entre el estator y la carcasa. |
- Deformación del bastidor del motor debido a una pata coja. | |
- Entrehierro desigual debido a problemas de fabricación o montaje. | |
Laminaciones en cortocircuito | - Sobrecalentamiento causado por alta temperatura del motor. |
- Arranques y paradas excesivos que provocan tensiones térmicas. | |
- Defectos en los cojinetes que provoquen tensiones mecánicas en las laminaciones. | |
- Contaminación del aislamiento. | |
Terminaciones rotas o sueltas | - Vibraciones o tensiones mecánicas debidas a desalineaciones o defectos en los rodamientos. |
- Ciclos térmicos que provocan expansión/contracción de las conexiones. | |
- Corrientes eléctricas elevadas que provocan generación de calor y debilitamiento de las conexiones. |
No hace falta decir que la fabricación y reparación de motores también es una causa muy común de averías eléctricas en los motores. Reparar un motor es un proceso complicado e intrincado que requiere un importante control de calidad. Por este motivo, existen diversas asociaciones que ayudan a identificar talleres de reparación de confianza. Una de las organizaciones de acreditación más conocidas para la reparación de motores es la EASA. Elegir un taller de reparación acreditado por la EASA puede ser de gran ayuda para obtener un trabajo de reparación fiable. Un beneficio adicional del control continuo es la identificación de reparaciones deficientes y la detección de estos casos de mortalidad infantil.
Resumen
El monitoreo de condiciones para detectar fallas eléctricas del motor puede ser útil para determinar el estado del motor. Para identificar estas fallas es necesario comprender las múltiples frecuencias generadas por la física que rodea el diseño de cada motor que se monitorea. Conocer la frecuencia de línea que llega al motor y la velocidad de rotación del motor simplifica enormemente el proceso de recopilación de estas frecuencias críticas.
Las señales de vibración son bien conocidas y están documentadas para las fallas eléctricas específicas analizadas. En la práctica, a menudo las señales no son claramente obvias sobre qué falla específica existe. Se sugiere utilizar métodos de prueba adicionales para validar y especificar con más precisión el tipo exacto de falla. La combinación de estos métodos da como resultado una definición muy precisa del tipo de falla y su nivel de madurez.
Uno de los mayores beneficios del monitoreo de condición de los motores se obtiene al garantizar que el motor esté funcionando en un estado que evite el desarrollo de fallas. Esto se logra al garantizar que los motores estén funcionando a la temperatura correcta, que los cojinetes estén en un estado saludable y que no se someta al motor a fuerzas externas adicionales. Se agrega valor adicional al proporcionar datos clave para determinar la causa probable del desarrollo de fallas o fallas. Esto ayuda a prevenir fallas recurrentes y a reducir los costos directos de mantenimiento.
Recursos adicionales
-Acreditación de taller de reparación
-Estudio sobre la confiabilidad de los motores eléctricos
-Vídeo explicativo de los principios del motor de inducción y las frecuencias importantes