
Introduction
Condition monitoring is a valuable tool for detecting faults and analyzing the health of motors. Motors are widely used in various industrial applications and can experience numerous issues over time. These issues can lead to decreased efficiency, increased maintenance costs, and motor failure if not addressed promptly. Condition monitoring helps identify these faults early on, allowing for timely maintenance and preventing costly breakdowns. Condition monitoring is also valuable to ensure motors are operating in a state that prevents electrical fault development.
Since motors are both electrical and mechanical by design, both fault types are common. A common misunderstanding is that vibration monitoring can only pick up mechanical-related defects in a motor and that electrical monitoring can only pick up electrical-related faults in a motor. In reality, there is an overlap in these techniques to identify motor-related faults due to the physical working principles of a motor.
The purpose of this article is to summarize electrical-related faults of motors, how to detect these faults, and methods of prevention.
Motor Operating Principles
To better understand motor electrical faults, there are some key principles around the function of a motor that need to be understood. This is primarily in the case of an induction motor where the rotational speed of the induced magnetic field (defined by the electrical line frequency and # of motor poles) differs from the mechanical rotating speed of the motor. These definitions are below:
- Line Frequency: The line frequency is the frequency of the alternating current (AC) supplied to the induction motor by the power grid. In most regions, the standard line frequency is 50 Hz or 60 Hz.. The line frequency determines the rate at which the magnetic fields in the stator windings alternate polarity, which, in turn, induces currents in the rotor to produce torque and rotation.
- Number of Motor Poles: The number of poles in an induction motor directly affects its operating characteristics and performance. Higher-pole motors have lower synchronous speeds and higher torque capabilities. 2 and 4 pole motors are the most common.
- Motor Synchronous Speed: The synchronous speed of a motor refers to the theoretical rotational speed of the motor's magnetic field created by the stator windings. It is determined by the frequency of the alternating current (AC) supplied to the motor and the number of magnetic poles in the motor.
The synchronous speed (Ns) of an AC motor is given by the following formula:
Ns = (120 * f) / P
Where:
Ns = Synchronous speed in revolutions per minute (RPM)
f = Line frequency in Hertz (Hz)
P = Number of poles in the motor
- Rotor Speed: The mechanical rotating speed of the rotor and shaft. This is always lagging the synchronous speed for induction motors. For permanent magnet motors, this is equal to the synchronous speed.
- Slip Frequency: Slip frequency is the difference between the synchronous speed of the rotating magnetic field in the stator and the actual speed of the rotor. Slip is also often calculated as a percentage (ratio of the slip speed and synchronous speed) but for this article we are focused on the slip frequency because it is used in determining the pole pass frequency.
Slip frequency (F_s) can be calculated using the following formula:
F_s = (Ns - Nr)
Where:
Ns = Synchronous speed (in revolutions per minute or RPM)
Nr = Rotor speed (in RPM)
- Pole Pass Frequency: The pole pass frequency is the frequency at which the stator winding magnetic fields "pass" each other as the rotor turns. It is a function of both the line frequency and the number of poles in the motor.
Pole pass frequency (F_p) can be calculated using the following formula:
F_p = F_s * P
Where:
F_s = Slip Frequency
P = Number of poles
- Rotor Bar Pass Frequency: The frequency generated based on the # of rotor bars in a motor and the rotor speed.This is often hard to obtain based on the difficulty of determining the # of rotor bars in a motor but is generally in the higher frequencies.
Rotor bar pass frequency (F_rb) can be calculated using the following formula:
F_rb = #rb * Nr
Where:
#rb = Number of rotor bars of the motor
Nr = Rotor Speed
The ability to detect motor electrical faults rely on the confident trending of the amplitude levels of these frequencies.
The Benefit of Sensing Magnetic Flux of a Motor
From the definitions above, it is fairly clear that calculating and trending these frequency values for every motor sample can be quite time-consuming. This is especially true for induction motors with varying speeds and loads. By sensing the magnetic flux of the motor, the line frequency can be determined. Simultaneously, the rotor speed can be determined from the accelerometer data. With these 2 variables defined, the remaining frequencies can be easily obtained and analyzed for fault development.
Types of Motor Electrical Faults
Motor electrical faults are typically classified as rotor related faults or stator related faults. This is primarily due to their fault signatures and root causes. The common faults and their signatures are described below.
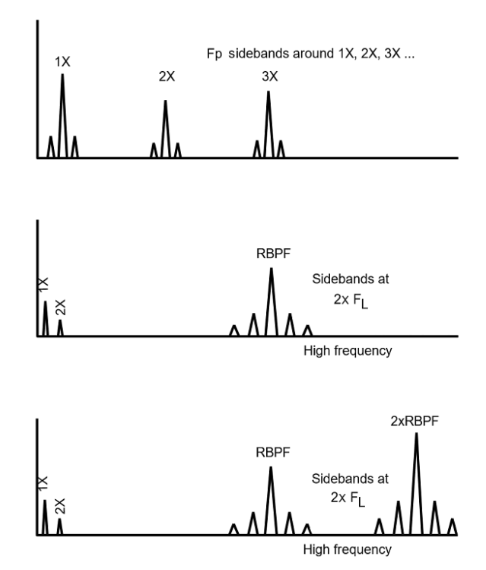
Rotor faults are focused around defects of one or multiple rotor bars, or rotor eccentricity. When diagnosing Rotor Eccentricity the critical frequencies to examine are multiples of the Rotor RPM (1X, 2X, 3X, 4X, 5X) with sidebands spaced at 2X the Line Frequency.
Rotor Eccentricity
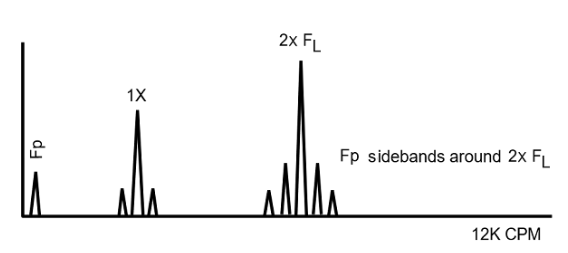
For rotor bar problems the critical frequencies are multiples of the Rotor Bar Pass Frequency (1X, 2X) with sidebands spaced at 2X the line frequency or 2X the pole pass frequency.
Rotor Bar Defects
The most common stator faults are stator eccentricity, shorted laminations, or loose connections. Stator eccentricity and shorted laminations are found with high amplitudes at 2X the Line Frequency. They are also very directional due to an uneven air gap.
Stator Eccentricity, Shorted Laminations
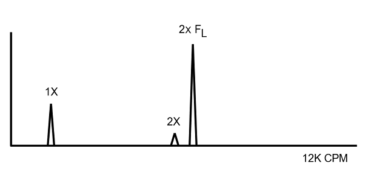
Loose connections present themselves as a phasing problem and have high vibration at 2X the Line Frequency with sidebands space at ⅓ of the Line Frequency.
Loose or Broken Connections

An important thing to note is that these faults are identified with vibration and picked up by the accelerometer. The magnetic flux sensor allows for a quick and accurate value of the line frequency to identify these frequencies and pinpoint the fault. It is also important to mention that motor load plays an important role in identifying these faults. A higher motor load generates a stronger magnetic field which results in the uneven forces to cause the vibration.
Additional Detection Methods
Aside from vibration monitoring, there are additional methods to uncover electrical faults in motors. The most widely known method is a Motor Circuit Analysis (MCA) which is a test done with the motor offline used to identify various faults like insulation loss. Additional methods such as Electrical Signature Analysis (ESA) and Motor Current Signature Analysis (MCSA) can be done online and used data from the voltage, current, or both to identify faults.
These methods are extremely valuable when motor faults are developing due to power quality issues. They can also typically detect electrical faults at an earlier stage. A summary of these methods is shown in the table below.
MCA | ESA | MCSA | |
|---|---|---|---|
Main Purpose | Test the electrical circuits and insulation system of an electric motor, primarily looking for issues related to insulation breakdown or contamination. | Analyze the electrical and mechanical health of rotating equipment. Has ability to detect some mechanical faults in the electrical signature | Specifically targets electric motors and electrical faults by analyzing the current signature patterns. |
Offline/Online | Requires motor circuit offline | Requires the motor running | Requires the motor running |
Voltage Measured | Yes (for insulation testing) | Yes | No (Current analysis only) |
Current Measured | Yes | Yes | Yes |
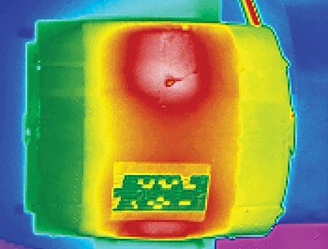
Another useful tool for motor predictive monitoring is thermal imaging. The main concept here is to determine if the motor is running at elevated temperatures and to look for potential localized hot spots. Localized hot spots could indicate partial shorts in the motor stator. An example of this is provided below.
The Hidden Benefit of Continuous Monitoring
Motor electrical faults are often undetected until the failure point is reached. Once this happens the motor is replaced and due to their complexity they often are not disassembled to determine the root cause of failure. This can lead to repetitive failures and chronic problems.
Condition monitoring helps to prevent this by providing continuous data for the variables that affect motor health. Monitoring the motor temperatures ensure that insulation degradation isn’t occurring. This is also true for bearing wear which can lead to air gap inconsistencies and in some cases rotor to stator contact. Having this additional information can help conclude root causes of fault development. This allows for a focus shift from post mortem root cause failure analysis to root cause fault analysis which maximizes asset life and greatly increases reliability and reduces overall maintenance costs.
Common Root Causes of Motor Electrical Faults
Detection of motor electrical faults and corrective work around these faults can provide a quick increase in reliability by moving work from an unplanned breakdown to a scheduled repair. This increase in reliability often isn’t realized in the maintenance budget. In order to reduce maintenance spending, it is important to understand the root causes of fault development and set a plan in place to minimize it. Below is a table with the typical root causes associated with the faults previously discussed.
Motor Electrical Faults | Common Root Causes |
|---|---|
Rotor Eccentricity | - Uneven load distribution on the rotor. |
- Misalignment between rotor and shaft. | |
- Bearing defects or wear. | |
Rotor Bar Defects | - Overloading or frequent starts/stops. |
- Excessive temperature leading to bar insulation failure. | |
- Vibration or mechanical stresses causing bar breakage. | |
Stator Eccentricity | - Misalignment between the stator and the housing. |
- Motor frame warpage due to a soft foot. | |
- Uneven air gap due to manufacturing or assembly issues. | |
Shorted Laminations | - Overheating caused by high motor temperature. |
- Excessive starting and stopping leading to thermal stresses. | |
- Bearing defects causing mechanical stress on laminations. | |
- Insulation contamination. | |
Broken or Loose Terminations | - Vibrations or mechanical stresses due to misalignment or bearing defects. |
- Thermal cycling causing expansion/contraction of connections. | |
- High electrical currents leading to heat generation and weakening of connections. |
It goes without saying that motor manufacturing and repair work is also a very common root cause for motor electrical faults. Repairing a motor is a complicated and intricate process that requires a substantial amount of quality control. For this reason various associations exist to help identify reputable repair shops. One of the most widely known accreditation organizations for motor repair work is EASA. Choosing a repair shop that is EASA accredited can go a long way in obtaining reliable repair work. One added benefit of continuous monitoring is identifying poor repair work and finding these cases of infant mortality.
Summary
Condition monitoring for detecting motor electrical faults can be helpful in determining motor health. Identifying these faults requires the understanding of multiple frequencies generated by the physics around the design of each motor being monitored. Knowing the line frequency going to the motor and the rotating speed of the motor greatly simplifies the process of collecting these critical frequencies.
The vibration signatures are well known and documented for the specific electrical faults discussed. In practice, often the signatures are not clearly obvious on what specific fault exists. It is suggested to use additional testing methods to validate and further specify the exact fault type. Combining these methods results in a highly accurate definition on the type of fault and it’s maturity level.
Some of the best value of condition monitoring for motors is obtained by ensuring the motor is operating at a state that prevents fault development. This is done by ensuring motors are operating at the correct temperature, the bearings are in a healthy state, and that no additional external forces are being subjected to the motor. Additional value is added by providing key data to determine the likely cause of fault development or failure. This aids in the prevention of recurring faults and reducing the direct maintenance costs.
Additional Resources
- Study on Reliability of Electrical Motors
- Video explaining induction motor principles and the important frequencies